
Описываемая конструкция не претендует быть заменой фотопластинки. Максимум с кем она может конкурировать, это одноступенчатые материалы Polaroid, использовавшиеся для предварительной оценки компоновки кадра и точности фокусировки. Учитывая, что фотоматериалы для одноступенчатого процесса форматом 13х18 сейчас, пожалуй, и не найдешь, то и единственному не трудно быть лучшим. Однако основное применение описываемого устройства, на мой взгляд, в демонстрационных и учебных целях. Здесь оно может проявить себя во всей красе. 12 лет назад я уже пытался приспособить ФКД для демонстрации подвижек и наклонов объектива в цифровую эру. Пробовал ее использовать и для съемки на старую фотобумагу. Теперь третья попытка найти применение этому раритету.
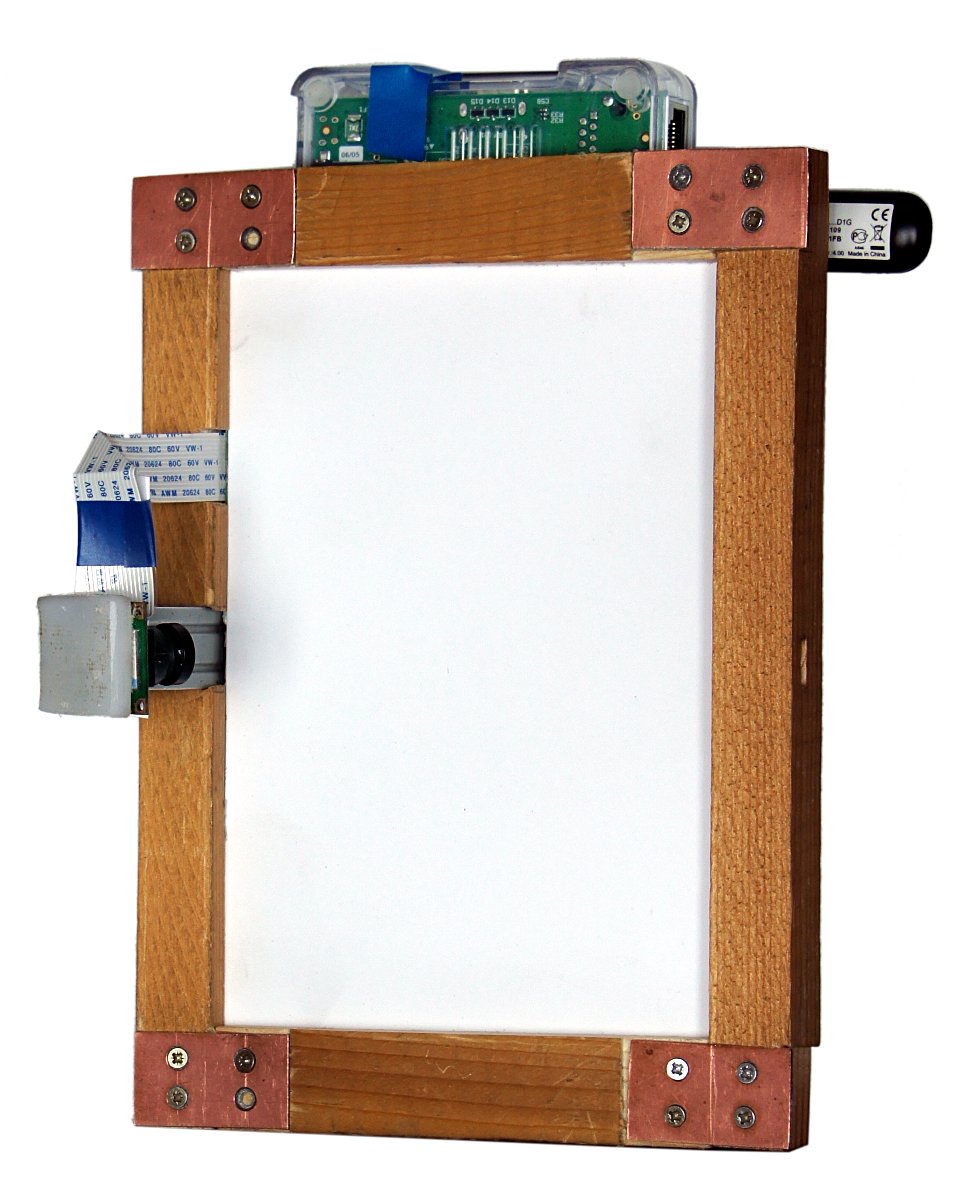
Конструктивно устройство выполнено как съемная кассета и ее фокальная плоскость совпадает как с плоскостью фотоматериала, так и матового стекла, на которые она может быть заменена с не большими трудностями, чем замена кассеты в камере.
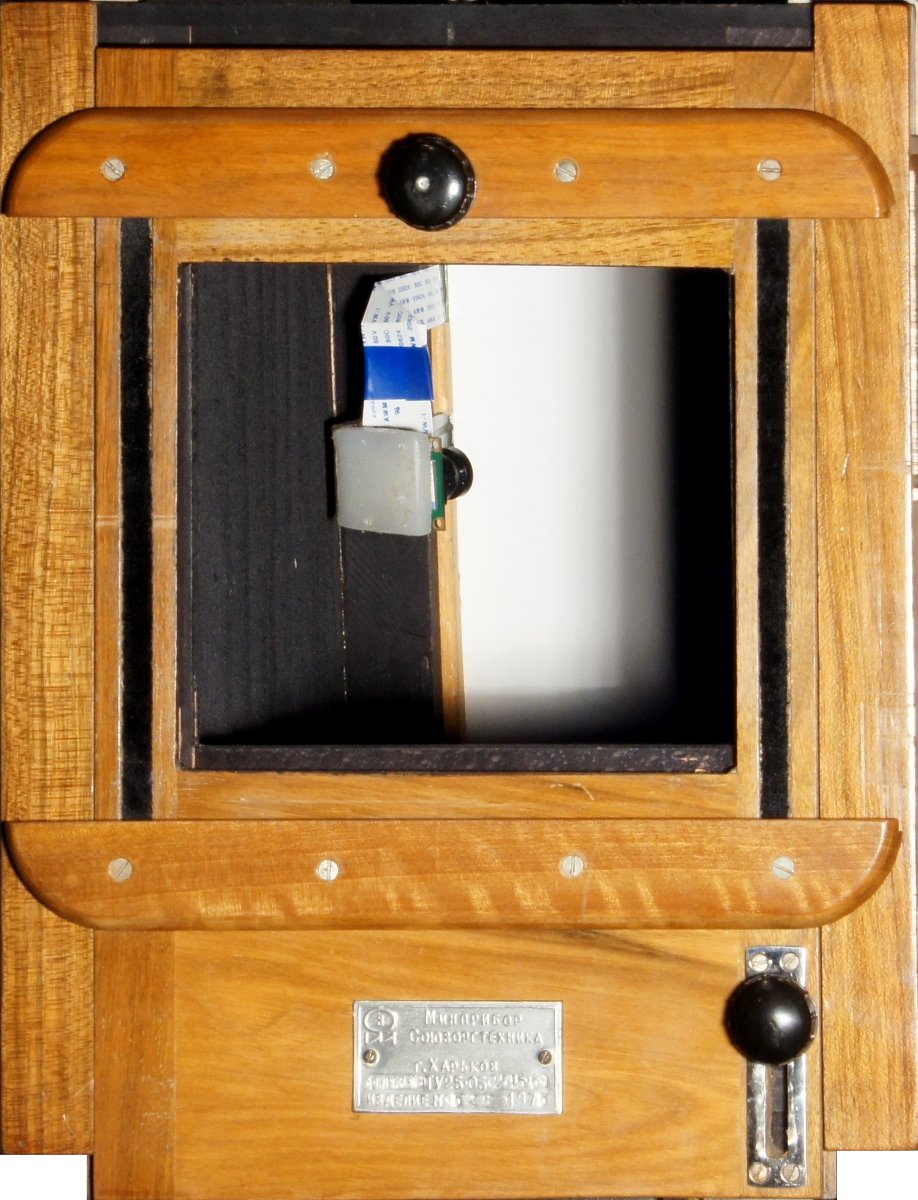
Picamera расположена сбоку от рамки и снимает изображение, сфокусированное на листе матовой бумаги для струйной печати.
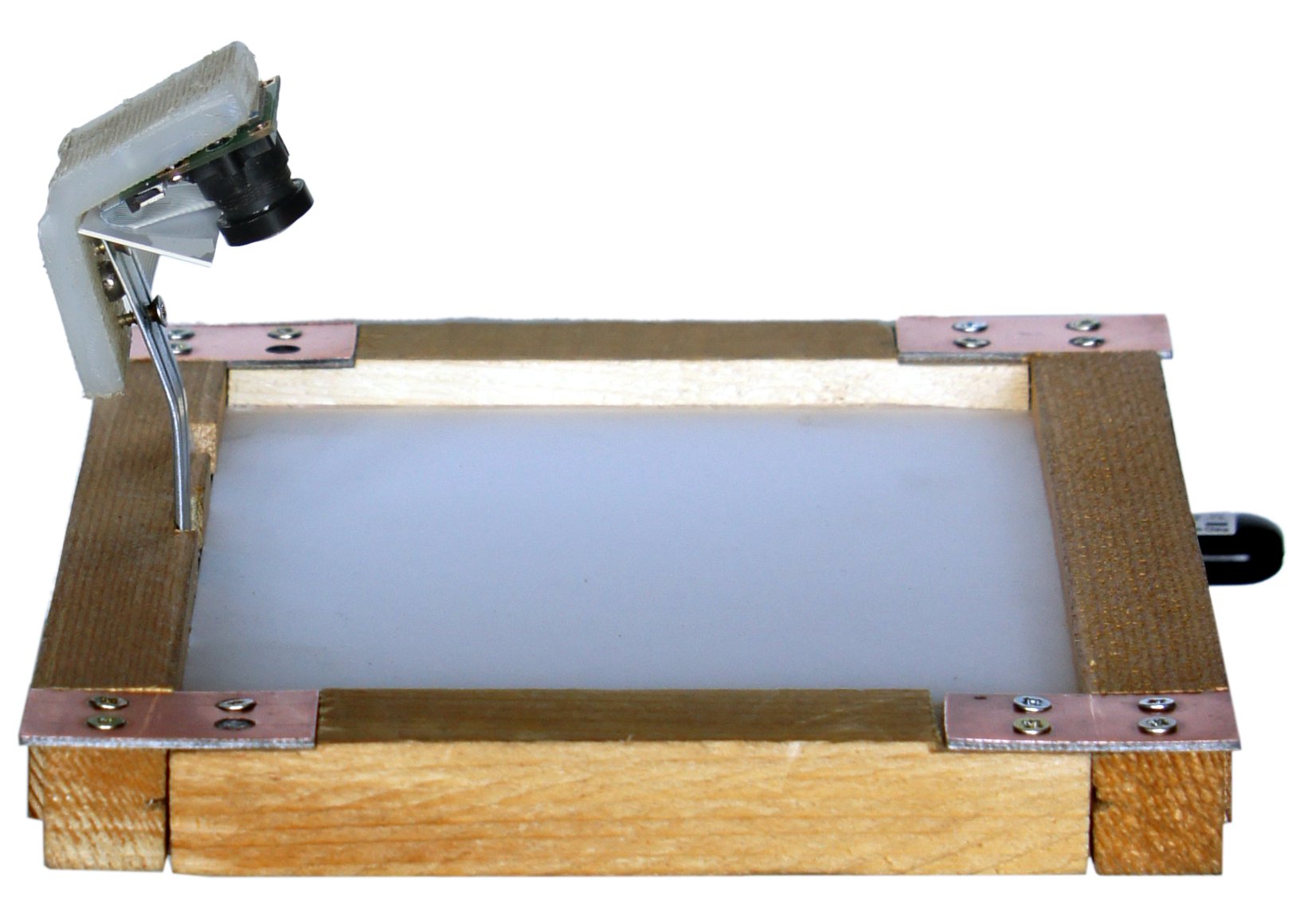
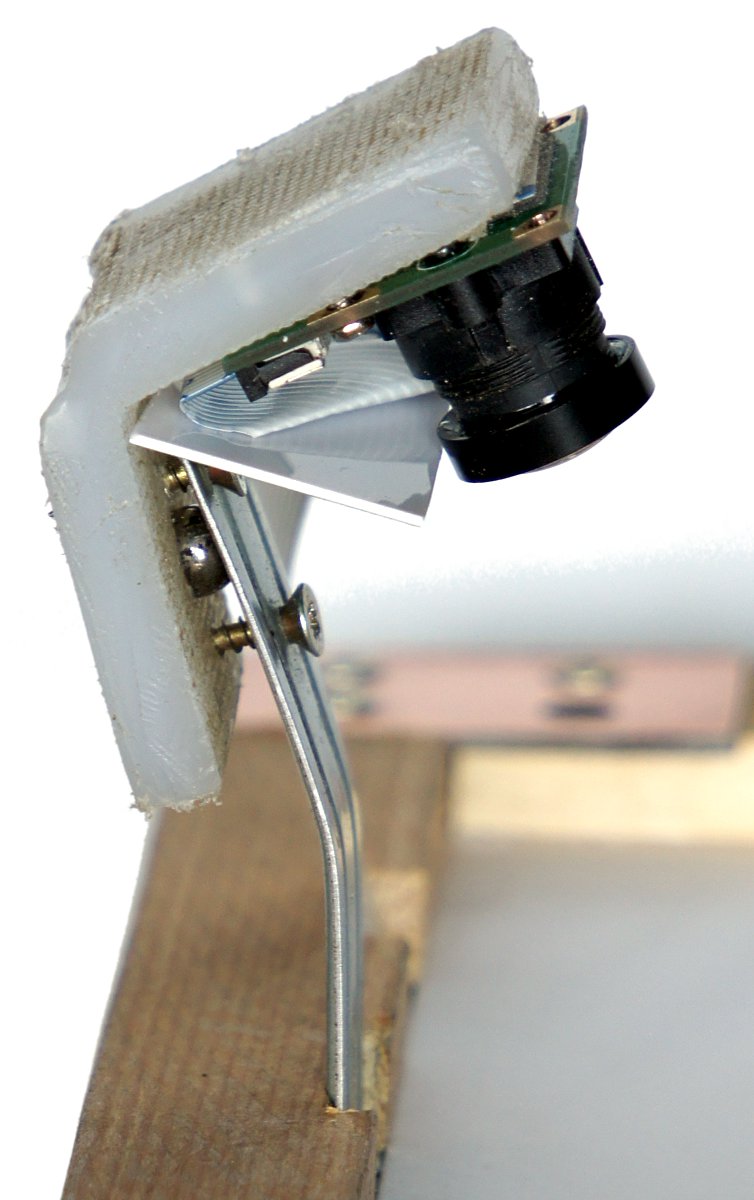
Используется объектив рыбий глаз с углом обзора по длинной стороне в 120 градусов. Это позволяет разместить камеру достаточно близко и таким образом, чтобы при наводке на бесконечность без наклонов и сдвигов камера не затеняла изображение от объектива Индустар 51 с фокусным расстоянием 210 мм. При наклонах и сдвигах в сторону камеры часть кадра виньетируется. Впрочем, для демонстрационных и контрольных целей это не очень существенно. Ну, а если это важно, то надо помнить, что безболезненные подвижки и наклоны возможны только в одну сторону, и соответствующим образом располагать камеру относительно объекта. При значительном растяжении меха также возможно виньетирование.
Компьютер Raspberry Pi крепится к рамке и управляется по WiFi. При желании к нему можно подключить клавиатуру и мышь.

При фокусировке в реальном времени на экране присутствует значительная дисторсия. Если же сделать снимок, то она программно исправляется даже на Raspberry Pi за время меньшее, чем требует мгновенный процесс от Polaroid. На большом компьютере это происходит практически мгновенно. Поскольку при фокусировке обычно мы рассматриваем сильно увеличенный фрагмент, то для него дисторсия практически незаметна.

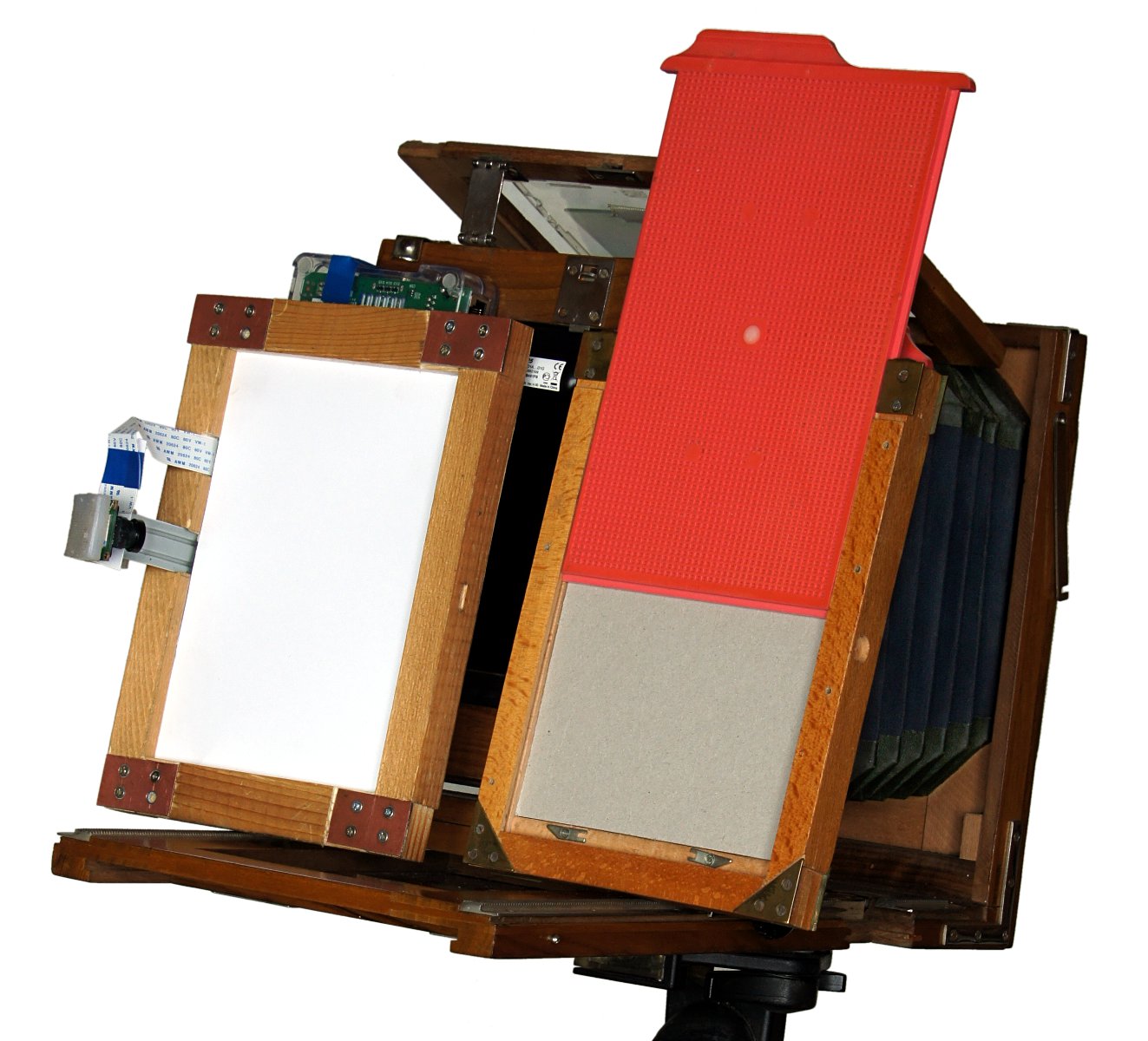
На снимке камера в рабочем состоянии. Монитор, подключенный через HDMI, используется только для полноэкранного просмотра. Пультом дистанционного управления является телефон. На фотографии он лежит на камере, однако при работе он естественно находится в руках у фотографа. Питание монитора и компьютера осуществляется от литий полимерного аккумулятора (LI-PO) 3 Cell 11.1 В емкостью 3000 мАчас. Монитор питается напрямую, компьютер через преобразователь, дающий на выходе 3,5 В. Для контроля разряда в цепь включен светодиодный и звуковой индикатор заряда. Емкости хватает на более чем час непрерывной работы. Я слабо себе представляю необходимость работать с этой камерой вне павильона, а в этом случае ее можно слегка запитать от сети.
От законов геометрии никуда не денешься, поэтому чувствительность у задника будет в несколько сотен раз меньше, чем у Picamera. Сравнение с экспонометром показывает, что при установленной чувствительности в 640 ISO чувствительность задника лежит в диапазоне 10-20 ISO в зависимости от спектра источника. Это значит, что при полностью открытой диафрагме объектива 1:4 можно снимать в пасмурный день с выдержкой в 1/8 с или в помещении с 500 Вт лампой накаливания, расположенной на расстоянии 1 м от объекта с выдержкой в 1/4 с. Для комфортной фокусировки нужна частота кадров побольше. Я использую 15 кадров в секунду, и камера в режиме предварительного просмотра, разгоняя до предела чувствительность, вполне справляется с этой задачей.

Изображение при предпросмотре до исправления искажений.

После исправления искажений.
Исправление искажений осуществляется программой пакетной сборки панорам из пакета hugin. За преобразования отвечает файл pto следуеющего содержания:
# hugin project fileРазрешение снизу кадра, который расположен дальше всего от камеры, падает и становится ниже, чем обеспечивает объектив ФКД. Ситуацию можно исправить, установив 2 или 4 камеры. Может улучшить положение и использование более длиннофокусного объектива, расположенного дальше от плоскости фокусировки. Однако в этом случае, чтобы сохранить подвижки и избежать виньетирования, придется расширять меха камеры. Вероятнее всего, это выльется в необходимость делать новые. Впрочем, объективов для этой камеры существует великое множество. Есть шанс, что чуть более длиннофокусный рыбий глаз будет оптимальным решением, не требующим переделки мехов. Можно попытаться отодвинуть и используемый мной объектив с фокусным расстоянием 1,84 мм, в этом случае мы потеряем в разрешении по центру кадра, но улучшим ситуацию с противоположной от камеры стороны.

Изображение при предпросмотре до исправления искажений.Сверху видно пятно затенения, вызванное Pi камерой.

После исправления искажений и коррекции баланса белого и экспозиции.

Изображение при предпросмотре до исправления искажений.

После исправления искажений.